
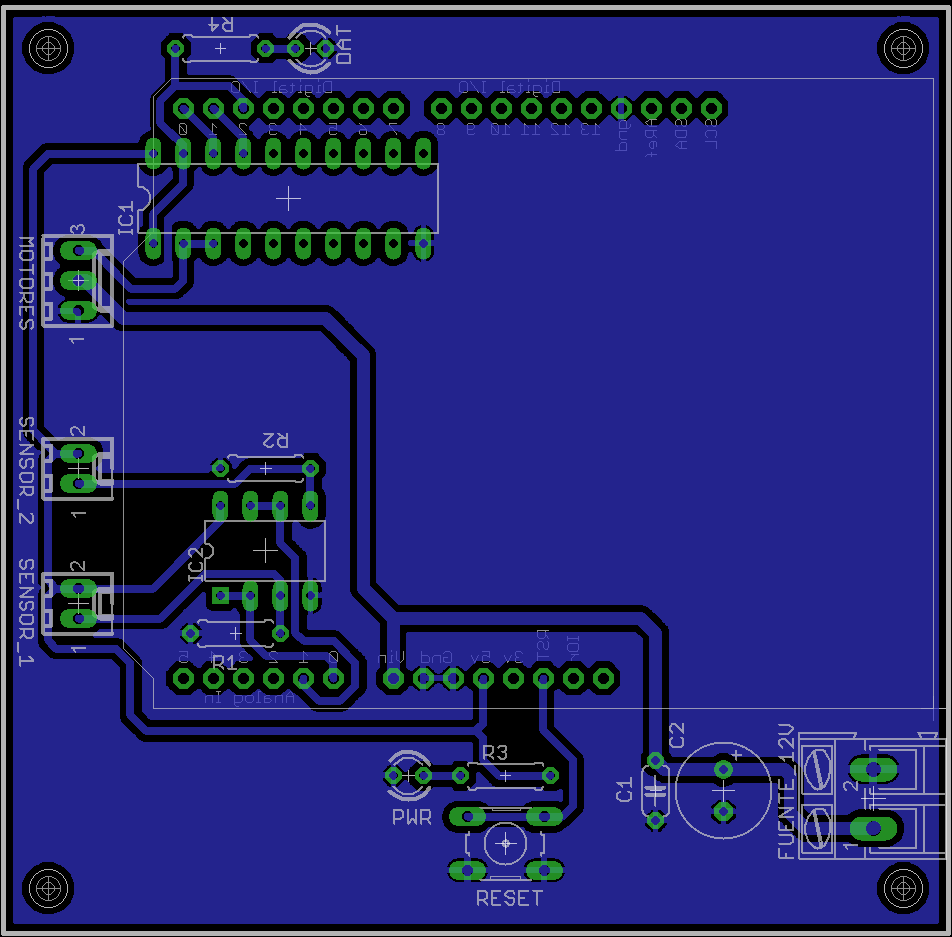
Para terminar con las publicaciones sobre el proyecto de la Mano Robótica, abordaré el desarrollo del sistema electrónico y el control. Teniendo en cuenta que el tiempo para presentar el proyecto era reducido se decidió utilizar una tarjeta Arduino con una PCB sencilla para reducir los tiempos de prototipado de una tarjeta más compleja.
Aunque el control del prototipo se hacía desde MATLAB era necesario utilizar una interfaz que comunicara el computador con los motores y los sensores, se seleccionó un Arduino Leonardo para cumplir con esta tarea aprovechando la posibilidad de emular un puerto serial para establecer la comunicación con MATLAB.

Para la selección de la fuente de alimentación del prototipo se tuvieron en cuenta los voltajes requeridos por cada uno de los componentes, al igual que la corriente máxima consumida, para la tarjeta de control se necesitan 5V y para los actuadores se requieren 12V; el consumo de los actuadores, de acuerdo a la hoja de datos era de 900mA cuando se ejercía el máximo torque, por lo que el consumo de los 13 motores ejerciendo el torque máximo era de 11.7A, sin embargo este escenario no se presentaba en el funcionamiento del prototipo. Finalmente se seleccionó una fuente DC de 12V a 5A.
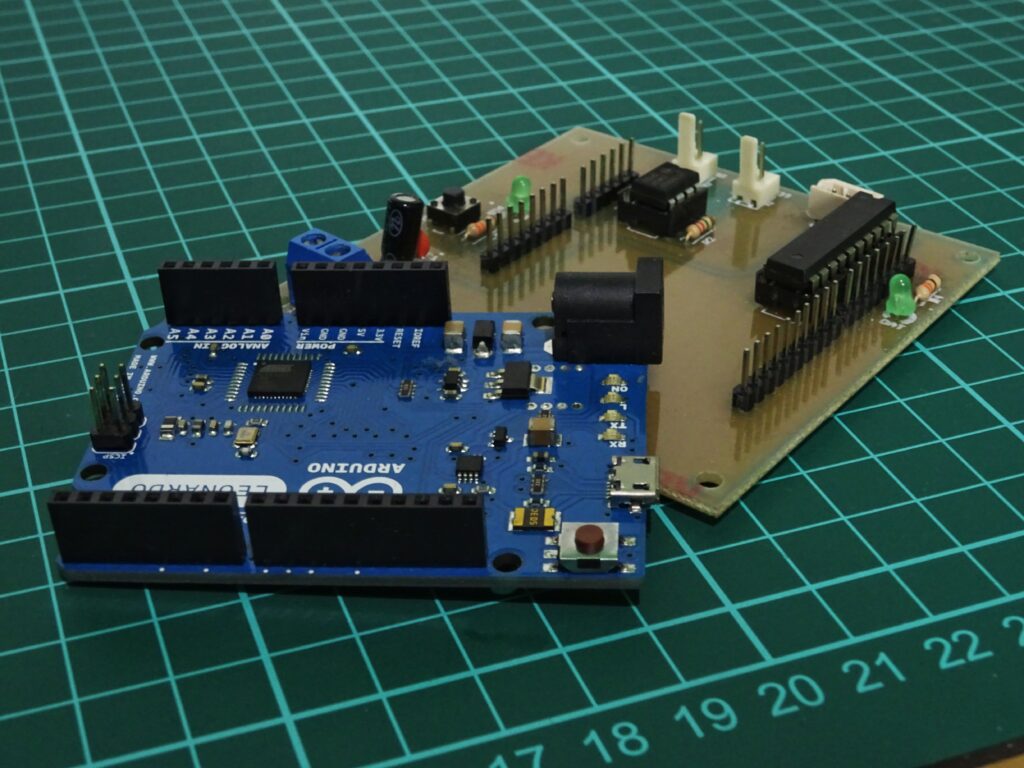
El Arduino se conectó a la tarjeta usando dos filas de pines de modo que este se mantiene en una posición fija. En la tarjeta se agregó un pulsador para ser el reset del Arduino, un diodo LED para indicar el funcionamiento del regulador de voltaje del Arduino y otro LED para indicar la actividad en la comunicación con los motores.
En MATLAB se escribió el programa encargado del control de posición y fuerza del prototipo, en el código se incluyeron un control PI y un PID. El PI se usó para controlar la posición de los dedos que efectúan la prensión, este control tiene acción hasta que los dedos se aproximan lo suficiente al objeto de prensión; una vez que los dedos hacen contacto con el objeto, el control PID entra en acción haciéndose cargo de los motores, este PID se encarga de controlar la fuerza aplicada durante la prensión.

Para hacer más sencilla la operación se hizo una interfaz gráfica con la herramienta GUI de MATLAB, en esta interfaz se podían seleccionar las diferentes posturas y prensiones de la mano.
Luego de todo el desarrollo del proyecto y de las pruebas, completé el documento y realicé la sustentación ante los jurados, afortunadamente el proyecto fue aprobado.