
Continuando con las publicaciones sobre la Mano Robótica abordaré el proceso de construcción; este proceso inicia luego de la evaluación del modelo CAD y de los materiales. La mayoría de las piezas del prototipo fueron hechas con impresión 3D usando el método FDM. La impresión de todas las piezas de la mano tardó unas 25 horas y la cantidad de ABS usado fue de 420 gr.

El proceso de ensamble comenzó con la organización de los motores de acuerdo con lo planteado en el modelo CAD, doce de los motores se ubicaron en dos columnas de seis motores cada una, estos controlaban los movimientos de los dedos y la flexión/extensión de la muñeca. El motor trece se ubicó sobre los demás motores, este efectuaba los movimientos de desviación cubital y desviación radial en la muñeca.

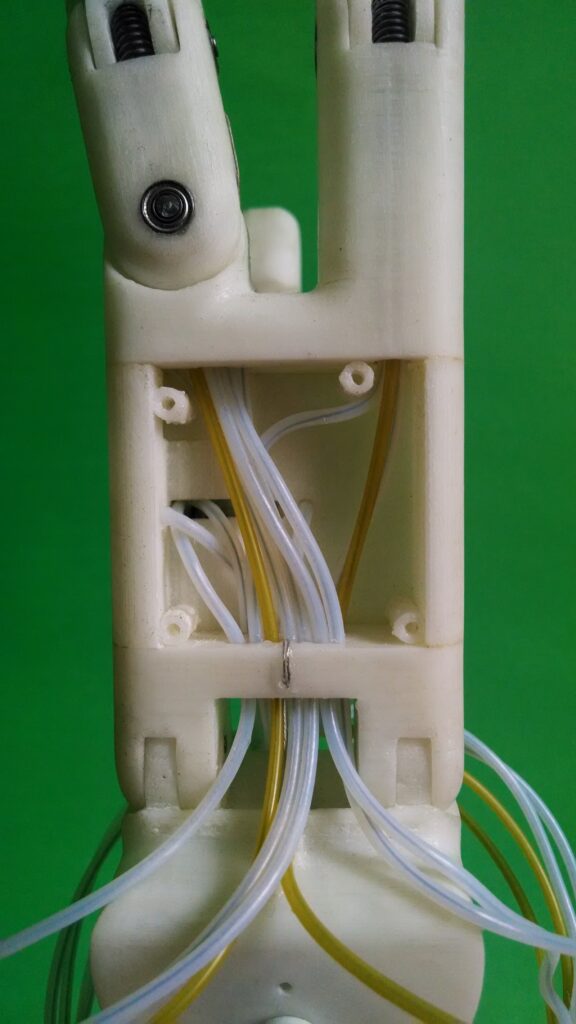
Después de organizar los motores, se ensamblaron cada uno de los dedos para luego articularlos con la palma de la mano, primero se armaron las secciones correspondientes a las falanges, cada falange tenía un cable que servía como tendón y un conducto por donde circulaba dicho cable; las falanges se articularon con rodamientos y ejes de acero-plata; en las articulaciones se usaron rodamientos rígidos de bolas.

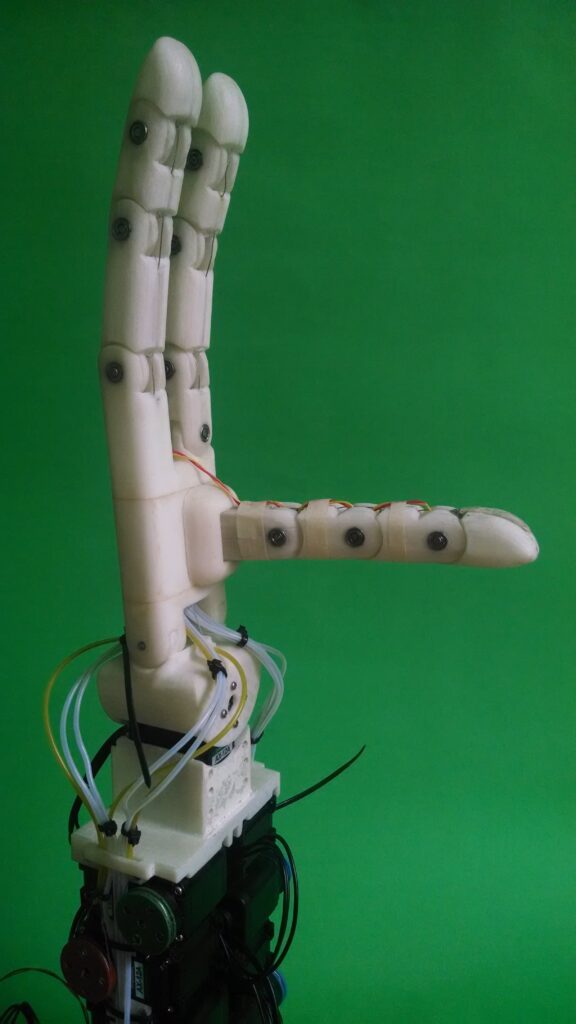
Una vez que los dedos fueron ensamblados estos se articularon con la palma de la mano, la palma se diseñó con un espacio vacío donde circulaban y se organizaban los conductos en los que se desplazaban los cables. El dedo I, al igual que los demás dedos, fue ensamblado con las piezas impresas, los rodamientos en las articulaciones, los resortes como elemento pasivo y los cables imitando los tendones.
Después de tener todo el montaje de la mano, se asignó y conectó un actuador a cada una de las articulaciones, la distribución se basó en las distancias entre el motor y la articulación; de modo que a una articulación como la interfalángica distal del dedo III le correspondió un motor cercano a la muñeca, mientras que una articulación como la metacarpal se conectó a uno cercano a la base del prototipo.
Las siguientes son las articulaciones, el motor asignado y el movimiento que efectúa:
- Muñeca, motor 13, movimiento de desviación radial/cubital
- Muñeca, motor 10, movimiento abducción/aducción
- Dedo I, motor 9, abducción/aducción palmar
- Metacarpal dedo I, motor 1, flexión/extensión
- Falange proximal dedo I, motor 3, flexión/extensión
- Falange distal dedo I, motor 5, flexión/extensión
- Falange proximal dedo II, motor 7, abducción/aducción
- Falange proximal dedo II, motor 2, flexión/extensión
- Falange media dedo II, motor 6, flexión/extensión
- Falange distal dedo II, motor 11, flexión/extensión
- Falange proximal dedo III, motor 4, flexión/extensión
- Falange media dedo III, motor 8, flexión/extensión
- Falange distal dedo III, motor 12, flexión/extensión
También se hizo la instalación del sensor de fuerza en la falange distal del dedo I, que es parte esencial de la prensión. Los motores y el sensor de fuerza fueron conectados a la tarjeta de control, por medio de esta tarjeta y desde MATLAB se llevó a cabo el control de posición y fuerza de la mano.
El siguiente vídeo muestra la Mano Robótica haciendo prensión sobre piezas de diferentes tamaños, geometrías y materiales; con el fin de validar los movimientos y el control.
La siguiente entrada será la última sobre la Mano Robótica y hablará sobre el control que se implementó.