
Hace bastante tiempo publiqué sobre la idea de mi proyecto de grado y sobre como a este se debía la inactividad del blog. El proyecto fue aprobado en septiembre del 2014 y ya me gradué, sin embargo, no había publicado nada sobre él porque quería descansar de este proyecto y porque ahora mi tiempo se va en tareas del trabajo. Pero debo cumplir con el deber de compartir el proyecto, por eso publicaré varias entradas comentando las etapas del diseño; debo aclarar que no publicaré información muy detallada por temas referentes a derechos de autor.
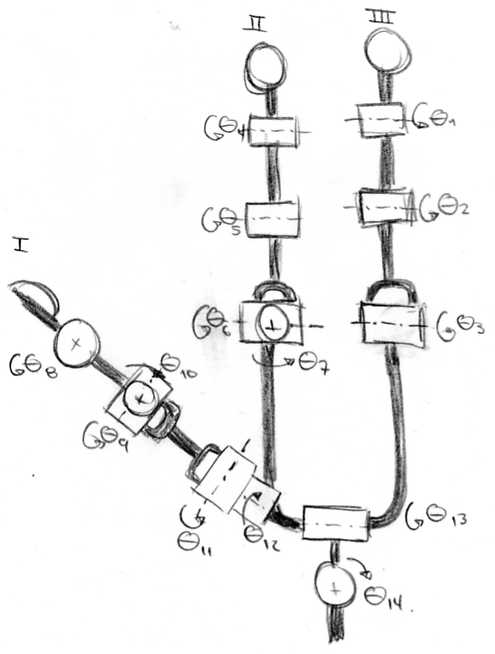
Para iniciar el diseño del prototipo se definen exactamente las acciones que debe ejecutar la mano, durante la revisión de información recolectada se propuso que la mano debería hacer los movimientos básicos de prensión sobre objetos con masa inferior a 200gr. Para los movimientos básicos de prensión se requieren un mínimo de tres dedos, donde uno de ellos debe ser opuesto a los otros dos; de esta manera se determina que la mano deberá tener tres dedos que simulan el pulgar, el dedo índice y el dedo medio. Se propone que los GDL (Grados de Libertad) necesarios para poder controlar los tres dedos y tener movilidad en la muñeca, son 13. La distribución de los GDL se hace basada en la mano humana, por lo que en la muñeca se ubican dos GDL, haciendo los movimientos de flexión/extensión y desviación cubital/desviación radial; el dedo pulgar tiene cuatro GDL, tres de ellos hacen movimientos de flexión/extensión y el restante hace el movimiento de aproximación palmar; el dedo índice también tiene cuatro GDL, tres de ellos hacen flexión/extensión y el restante hace abducción/aducción, finalmente el dedo medio tiene tres grados de libertad, todos ellos hacen movimientos de flexión/extensión.
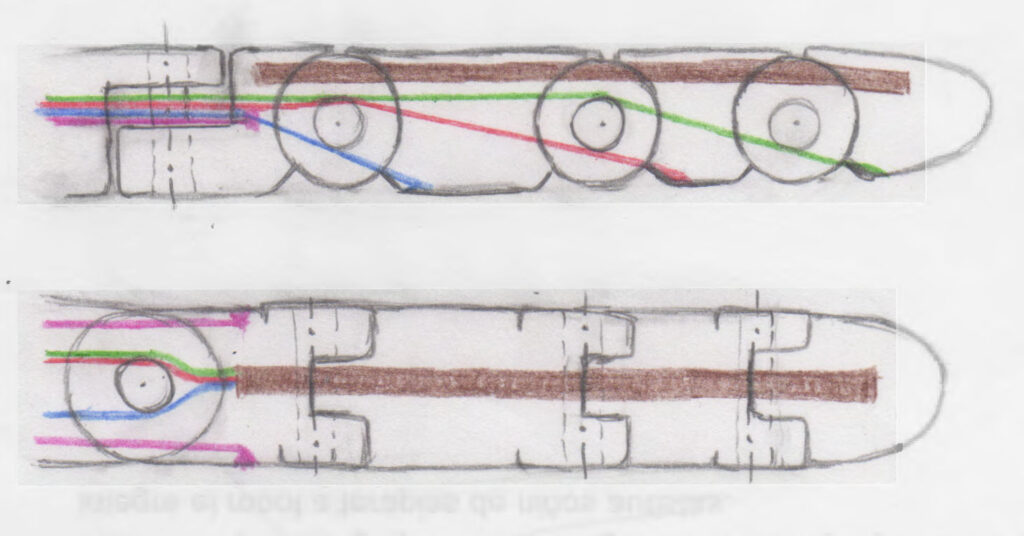
Como parte del desarrollo del prototipo se toman como referencia algunas manos robóticas comerciales y algunas hechas en universidades tanto en Colombia como en el exterior. Para la selección de los actuadores y métodos de actuación se recurre a estas referencias, usado la metodología de diseño QFD (Quality Function Deployment) se selecciona la actuación remota mediante tendones y resortes, el trabajo será realizado por servomotores ubicados en el antebrazo del prototipo.
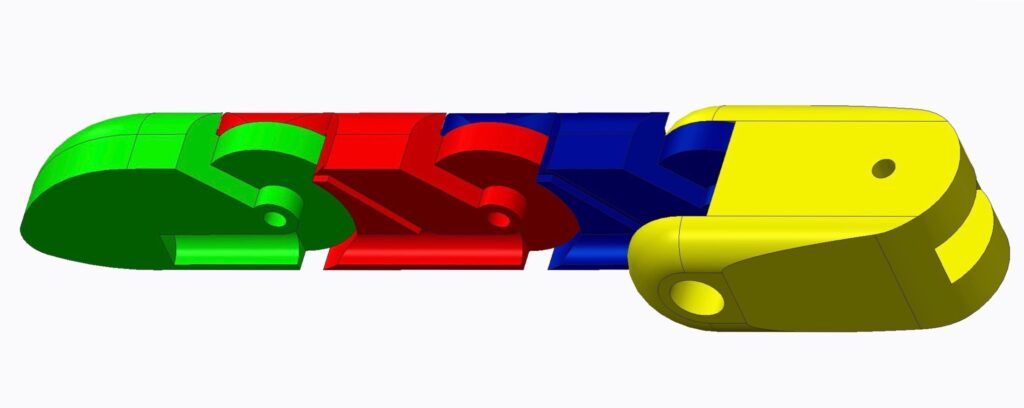
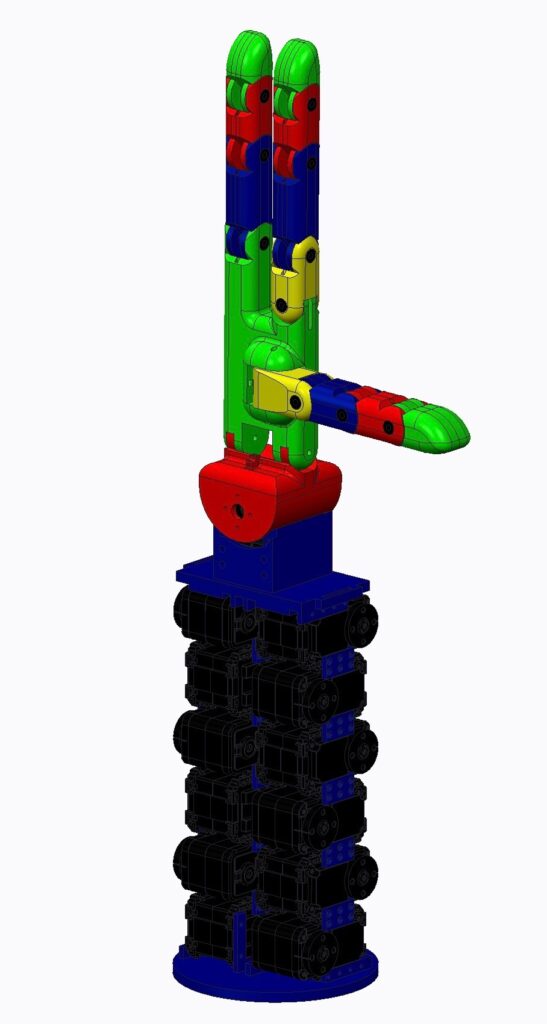
El diseño del prototipo se hace en el software Creo Parametric y las medidas se basan en las proporciones antropométricas de la mano derecha de un hombre adulto. Las piezas se modelan teniendo en cuenta la manera en que serían construidas y posteriormente ensambladas. Luego de modelar todas las piezas estas se ensamblan en el software para ver en detalle cómo se ajustan, también se agregan los modelos de los motores utilizados obteniendo un primer vistazo de como quedara el prototipo luego de construido.
El modelo obtenido en Creo Parametric se exporta a SimuLink de MATLAB para probar los movimientos de cada articulación y detectar posibles fallas por choques entre las piezas.
En unos meses estaré haciendo otras publicaciones hablando del modelo matemático y las simulaciones, más adelante vendrán otras sobre el sistema electrónico, la construcción, la programación y las pruebas.
Pingback: Mano Robótica – Modelo Matemático | palmacas
Pingback: Mano Robótica – Simulación | palmacas