
Como parte de la organización del Segundo Concurso Interno de Robótica RobETITC se dieron algunas tutorías a los participantes con el fin de que el desempeño en el concurso fuera el mejor, aparte de las tutorías se presentó un robot modelo para que las personas que participaban por primera vez tuvieran una idea de lo que deberían construir, así que comparto dicho robot por si alguien está interesado en hacer su primer seguidor de líneas o se quiere basar en el y hacer su propia versión.
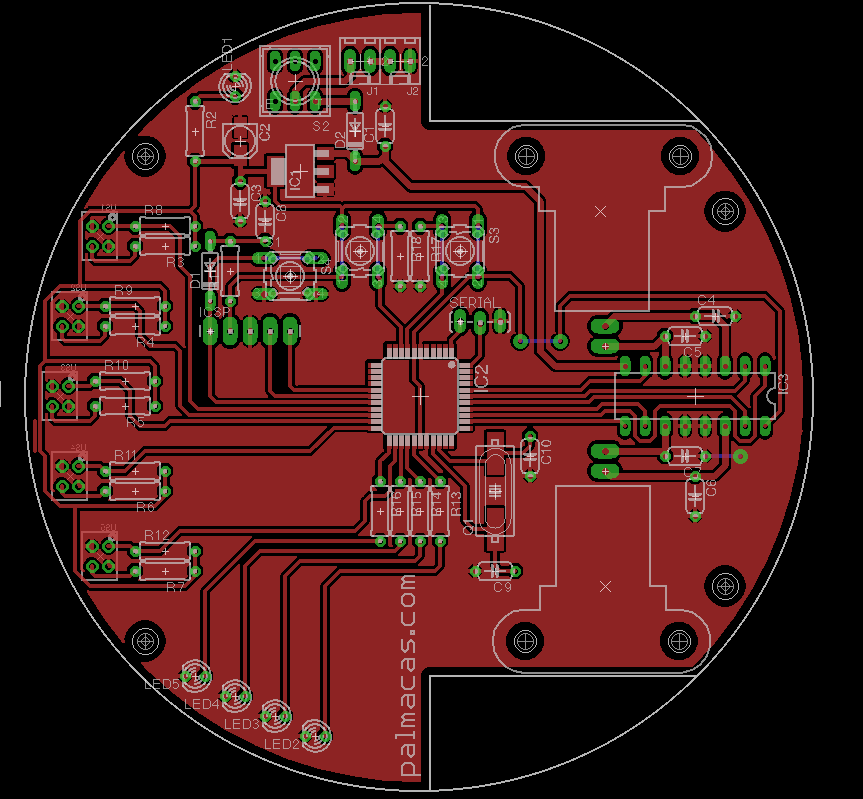
El robot está construido sobre una sola PCB, tiene un microcontrolador PIC16F887 funcionando con el cristal interno de 8MHz, el driver para los motores es un puente H L293 y los sensores son unos CNY70. Además, tiene algunos LEDs para indicar funciones, dos pulsadores para seleccionar la pista en la que va a participar, un pulsador de RESET y un regulador de 5V ya que el robot está alimentado con dos baterías de LiPo de 3.7V cada una.
Para finalizar dejo un par de vídeos del robot recorriendo las pistas de la categoría básica y media durante el concurso.
El código del microcontrolador no es muy elaborado porque el tiempo para desarrollarlo fue poco, sin embargo, lo dejo disponible.
GitHub: SeguidorLinea
Si tienes alguna inquietud no dudes en comentar.
Excelente me ha ayudado bastante tu aporte GRACIAS ¡¡¡